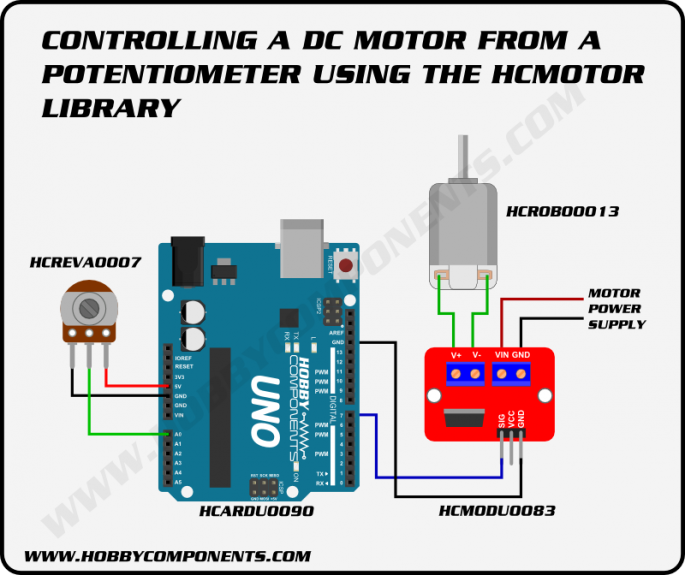
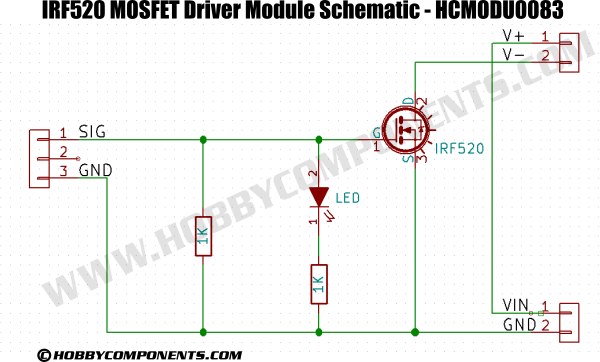
Este pequeno módulo é uma placa de interrupção para o transistor IFR520 MOSFET.
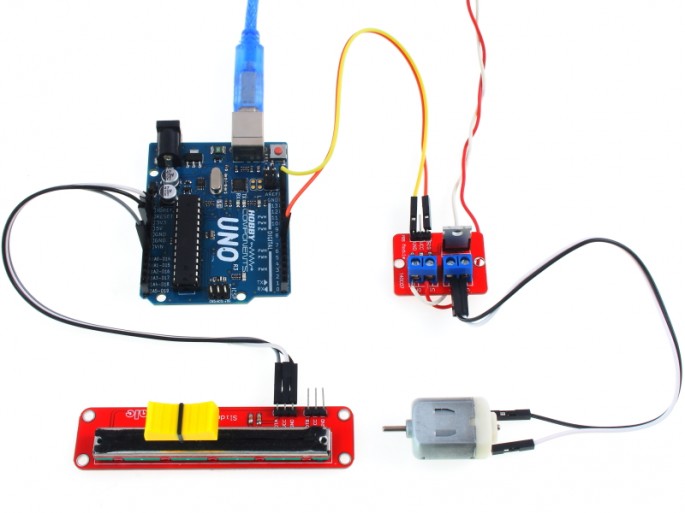
O módulo foi projetado para alternar cargas DC pesadas de um único pino digital do seu microcontrolador. Seu principal objetivo é fornecer uma maneira de baixo custo para acionar um motor CC para aplicações de robótica, mas o módulo pode ser usado para controlar a maioria das cargas CC de alta corrente. Terminais de parafuso são fornecidos para fazer interface com sua carga e fonte de energia externa. Um indicador LED fornece uma indicação visual de quando sua carga está sendo trocada.
/* Include the library */
#include
/*Defina o pino que controlará o motor. Observe que ele não precisa ser um pino PWM - qualquer pino digital serve!*/
#define MOTOR_PIN 7
/* Defina o pino analógico ao qual o potenciômetro será conectado.*/
#define POT_PIN A0
/*Crie uma instância da biblioteca */
HCMotor HCMotor;
void setup()
{
/* Inicialize a biblioteca */
HCMotor.Init();
/* Conecte o motor 0 ao pino digital 7. O primeiro parâmetro especifica a
número do motor, o segundo é o tipo de motor e o terceiro é o
pino digital que controlará o motor*/
HCMotor.attach(0, DCMOTOR, MOTOR_PIN);
/*Defina o ciclo de serviço do sinal PWM em incrementos de 100uS.
Aqui 100 x 100uS = 1mS de ciclo de serviço. */
HCMotor.DutyCycle(0, 100);
}
void loop()
{
int Speed;
/* Leia o pino analógico para determinar a posição do pote. O mapa
A função aceita esse valor que pode estar em qualquer lugar entre 0 - 1024
e reduz para baixo para corresponder à faixa do ciclo de trabalho de 0 - 100 */
Speed = map(analogRead(POT_PIN), 0, 1024, 0, 100);
/* Defina o horário de funcionamento do ciclo de serviço para corresponder à posição do potenciometro. */
HCMotor.OnTime(0, Speed);
}
Se você pretende usar este módulo com um Arduíno, consulte a nossa biblioteca HCMotor. Os links estão abaixo.
Baixe a lib aqui HCMotor