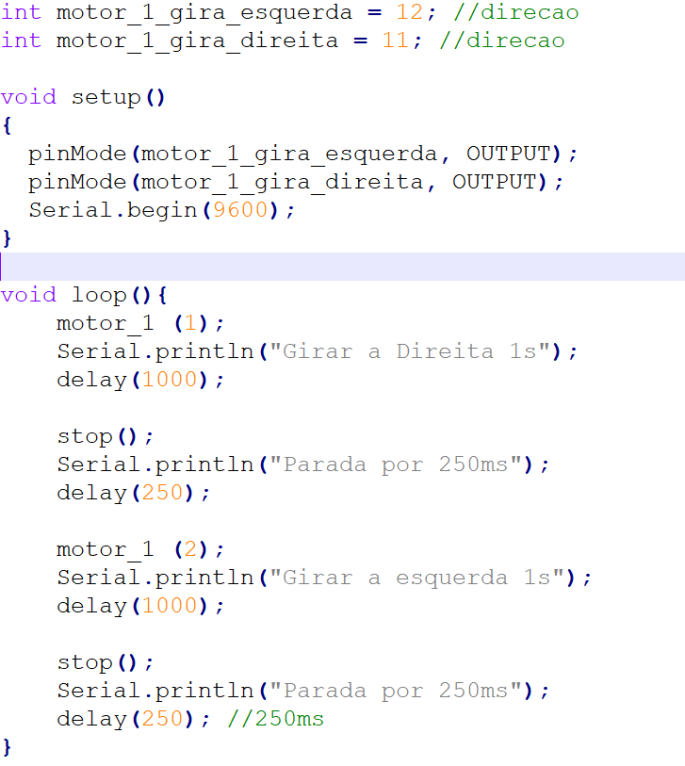
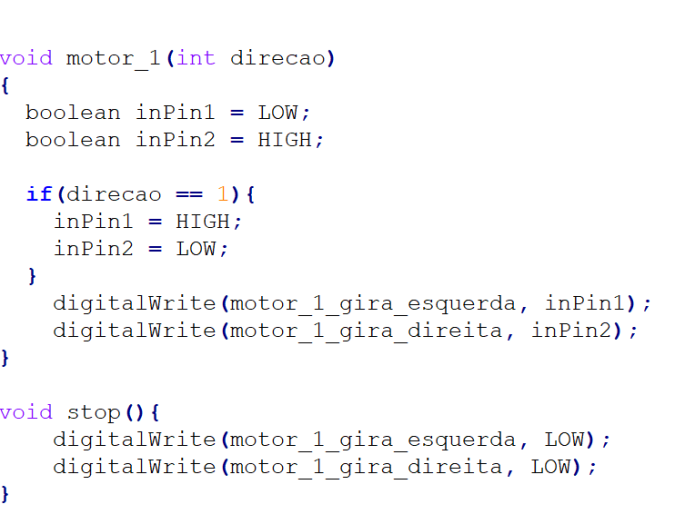
Este código em C pode ser compilado e executado no Arduino para realizar um teste no modulo L9110s, ele vai gerar movimento no motor nas duas direções com um stop entre a alternância no movimento.
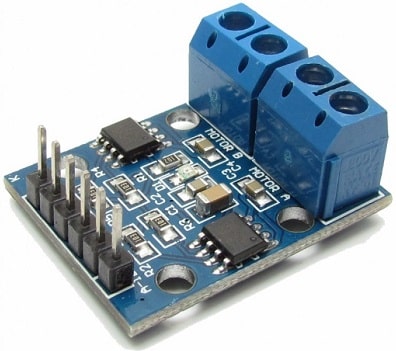
Características:
* Baixa corrente de trabalho* Tensão de alimentação: DC2.5-12V
* Cada canal tem 800mA saída de corrente contínua
* Pico de corrente de Saída: 1.5A~2A por porta (Somente pico, ou seja, breve)
* Tensão dos terminais de controle: 2.5~7.7 V
* Corrente dos terminais de controle: 500uA
* CMOS TTL compatível, pode ser conectado diretamente ao microcontrolador
* Pode controlar dois motores DC ou um motor de passo de duas fases (4 Fios)
* Tamanho aproximado: 27 x 21 mm
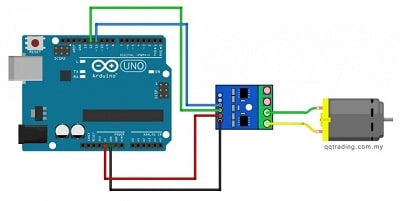
Pinagem:
Pino VCC: Alimentação do módulo (Mesma tensão do motor até 12V)
Pino GND: 0V
Pino IA1: Entrada de controle do motor 1
Pino IB1: Entrada de controle do motor 1
Pino IA2: Entrada de controle do motor 2
Pino IB2: Entrada de controle do motor 2